湖南大学嵌入式与网络计算湖南省重点实验室负责的国家自然科学基金重点项目——安全关键汽车信息物理系统建模理论与系统设计(61932010),已由湖南大学、华中科技大学、暨南大学三家单位合作完成,项目执行期为2020年1月1日-2024年12月31日。在项目负责人李仁发教授的带领下,项目的结题工作已经接近尾声。
本项目自2020年1月开始,历时5年,面向新一代网联汽车基础软件(网络、操作系统、工具),研究网络结构与性能分析以及实时嵌入式系统设计理论,研究ACPS建模理论与方法,研究功能安全&信息安全理论、方法与测评,将理论研究成果,应用于汽车操作系统设计。针对研究目标,我们在Zone架构,ACPS建模理论、功能安全与信息安全技术、系统设计、工业应用等四方面,解决了建模、Zone架构、安全评估、任务调度、通信优化、TSN、域控制器操作系统虚拟化技术、工具链等若干关键科学问题,取得了一系列研究成果,顺利完成项目预期目标。
项目的主要研究内容
(1) ACPS数据的统一建模理论体系:
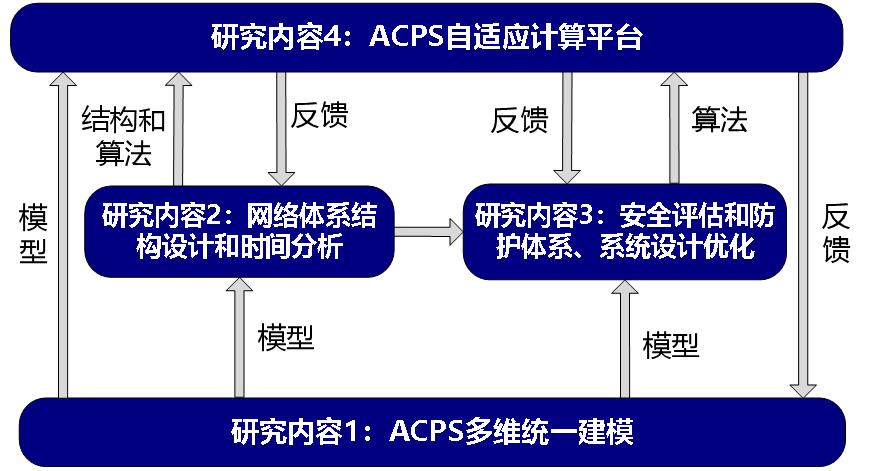
研究内容一通过建立统一的模型理论框架,实现了ACPS中离散计算系统和连续物理系统的统一建模,为后续的结构、算法和平台的设计和优化提供了模型基础。研究内容一的成果直接支持了研究内容二和研究内容三的开展,确保了系统的综合安全和高效实现。
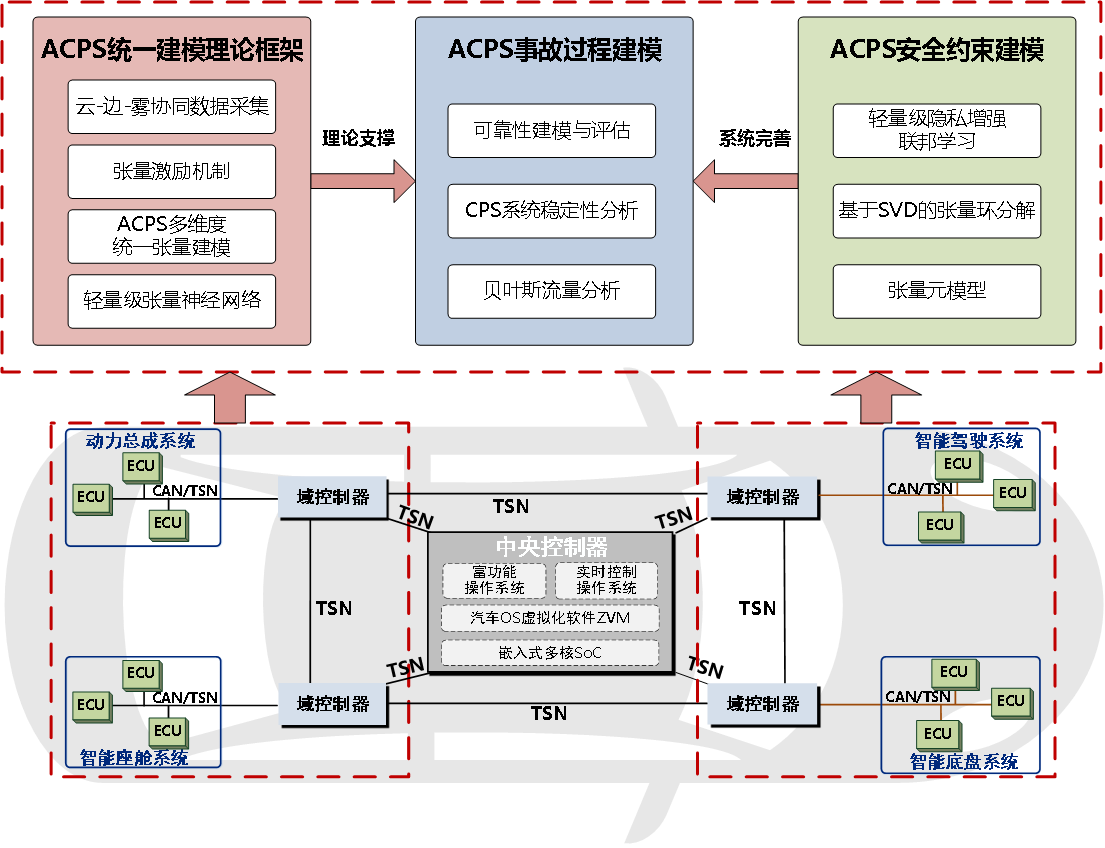
ACPS数据的统一建模理论体系的研究内容
(2) ACPS的网络体系结构设计及时间分析:
研究内容二在研究内容一提供的模型理论框架基础上,进一步设计与优化了汽车信息物理系统的体系结构,从理论上深入探索ACPS网络体系结构模型及其对网络通信时延的影响,研究内容二的关系图如下。
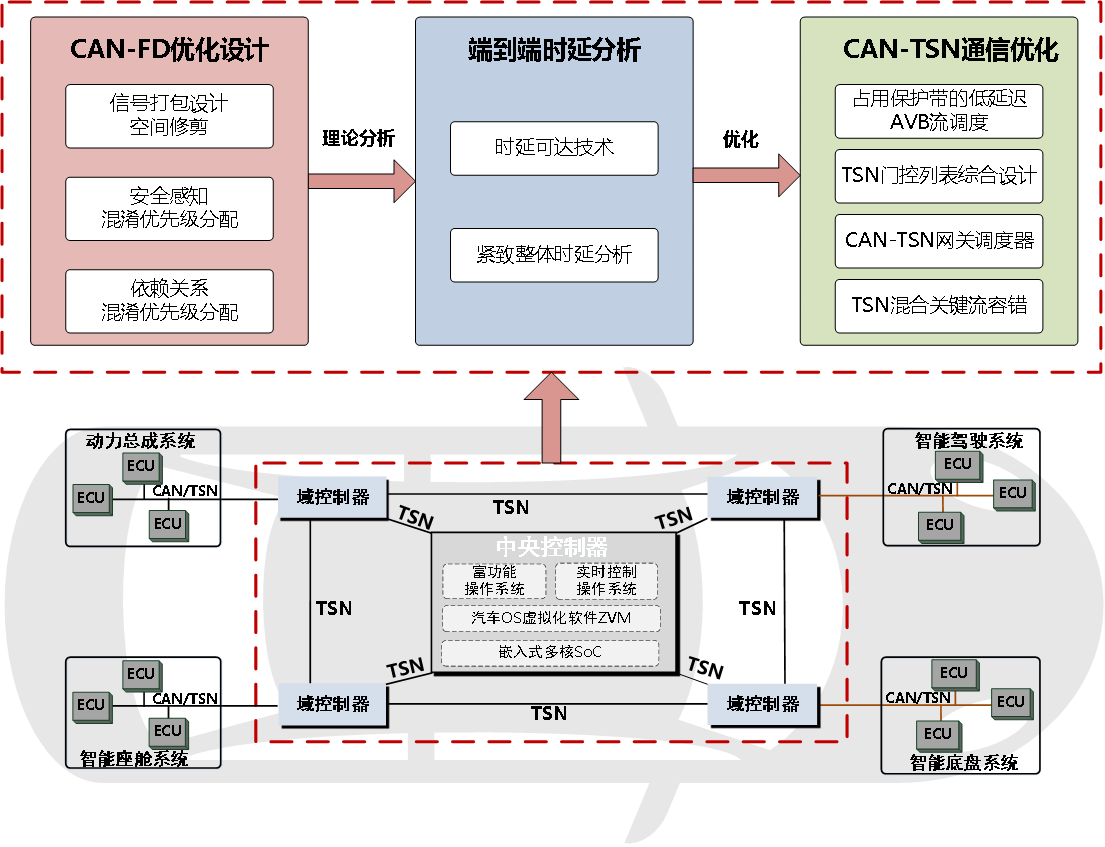
ACPS的网络体系结构设计及时间分析的研究内容
(3) 高效、快速且资源友好的综合安全评估及防护理论体系
研究内容三设计汽车信息物理系统的安全评估与防护策略以及优化方法,构建涵盖底层密码技术、通信协议直至应用方案的汽车信息安全防护框架,以确保系统的整体防护能力。研究结果关系如图4所示。
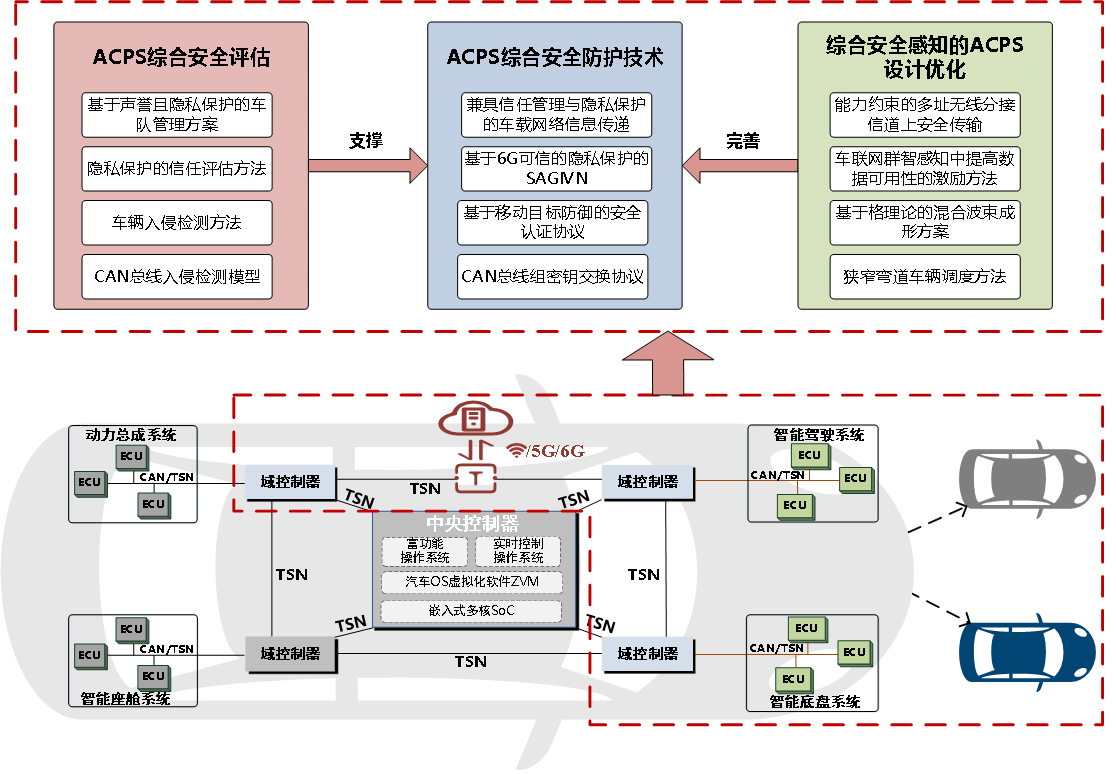
综合安全评估及防护理论体系的研究内容
(4) ACPS运行平台基础软件研发:
研究内容四在研究内容一、研究内容二和研究内容三的基础上,开展了系统安全增强和CAN网络入侵检测技术研究,并最终面向安全关键汽车信息物理系统,构建了符合 AUTOSAR平台标准的计算平台。研究关系如下图所示。
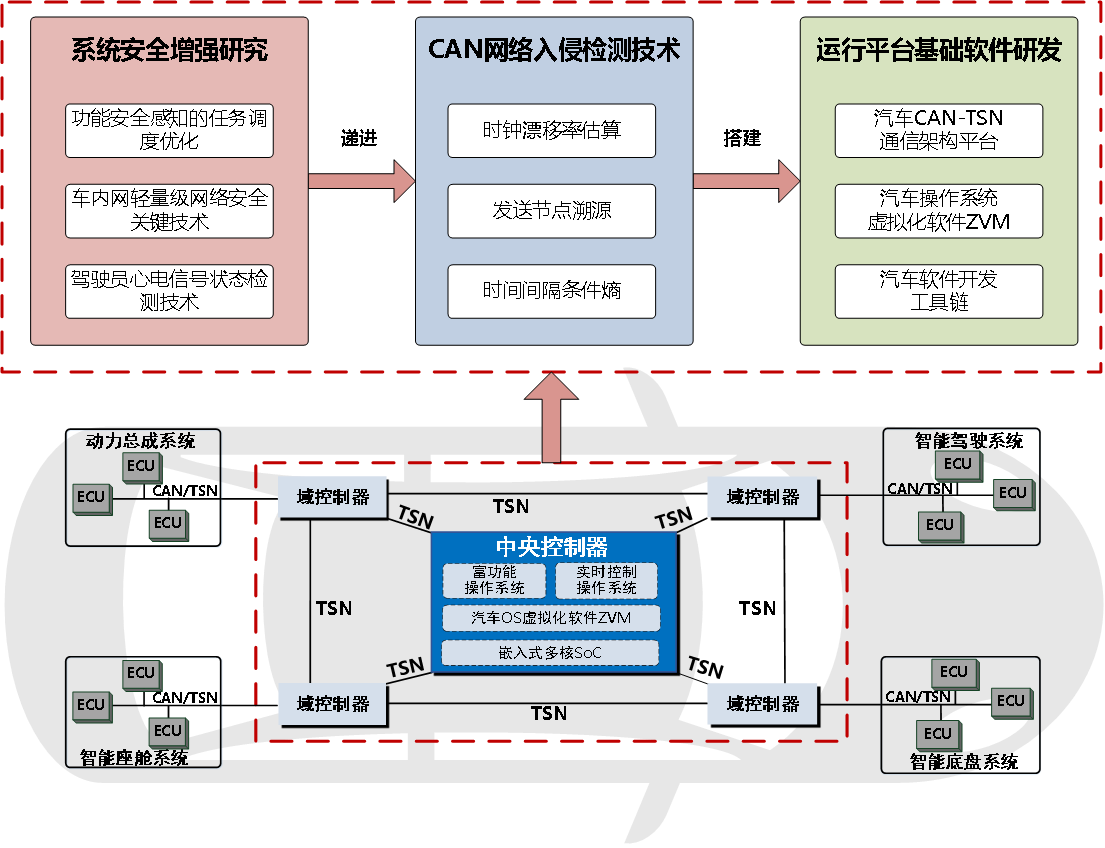
ACPS运行平台基础软件研发的研究内容
本项目发表学术论文144篇,其中 IEEE/ACM Transactions 类期刊、CCF A/B类期刊或会议论文论文121篇,中文期刊8篇。译著1部,专著1部。专利、软件著作权38项已授权。成果应用与转化方面,已有自主可控车内网络平台1个,自主可控汽车OS虚拟化软件1项,汽车软件开发工具1套。孵化的产学研合作项目4个。项目负责人及成员作为大会主席、组织委员会主席举办国内\国际学术会24次,其中国内4次、国际20次。
本项目相关的新一代安全虚拟化体系结构成果一共贡献4项开源,为Linux基金会、华为、瑞芯微、百度等社区生态建设提供了关键贡献:
团队在多车感知融合优化机制与模型、车内通信平台、汽车操作系统虚拟化、汽车软件开发工具链上主持研发了相应基础软件并已有工业应用。
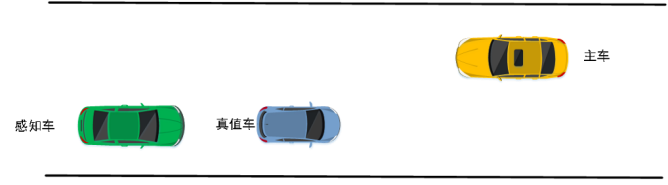
多车感知融合典型场景

实车测试验证
CAN-TSN平台架构
ZVM参与的展台(左为23年鲲鹏昇腾展台,右为24年欧拉展台)
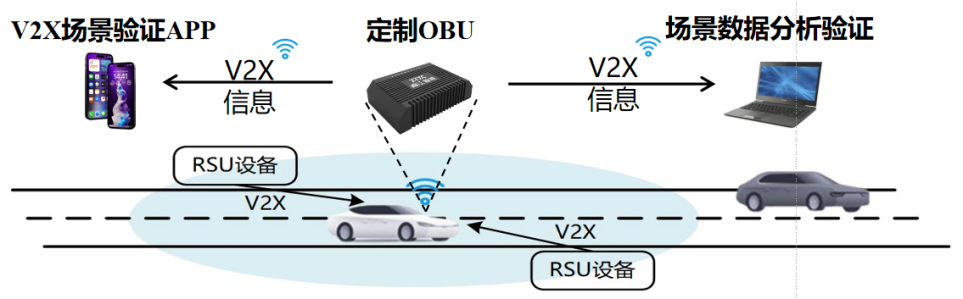
V2X场景验证系统

实车验证测试
汽车软件开发工具链:汽车软件开发工具链长期被Bosch、Vector, Mathworks等国外公司垄断,这些工具需要高昂的Licence费用,由于打磨时间长,已深度嵌入到汽车软件研发体系,国内虽有华为、东软睿驰、经纬恒润开发了部分替代工具,但因使用体验差而难以融入汽车软件供应商的固有开发流程体系中。我们结合专家观点与工程师的痛点需求开发出工具,开发了信号一致性检测(替代Bosch Scat工具)、信号打包(替代Mathworks Simulink CAN Unpack工具)、信号拆包(替代Mathworks Simulink CAN Pack 工具)等工具。相比已有工具,在性能上或求解质量上得到了提升,实现了国产化替代。
汽车软件开发工具链

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
