两轮自平衡小车是一种基于倒立摆原理的智能机器人,它通过内置的传感器获取角度、加速度等数据,利用控制算法实时调整电机速度和方向,以维持动态平衡。目前市面上的两轮自平衡小车大多使用STM32单片机这样的裸板控制,而裸板控制通常在资源管理、实时性和扩展性不足等问题。ARM64架构的处理器通常具有更高的处理速度和更多的核心,可以处理更复杂的算法和任务,RTOS能提供任务调度、内存管理、多线程等支持,这有助于提高程序的实时性和可靠性,因此使用ARM64架构的板卡配合Zephyr RTOS可在很大程度上弥补这些问题。嵌入式实验室的小伙伴们(温浩、熊程来、谢国琪老师)通过选择散装零部件,自主组装平衡车,开发基于Zephyr RTOS的驱动程序和平衡车应用程序,调节PID算法,在RK3568开发板上搭载Zephyr RTOS作为主控,实现了小车的自平衡、加减速与转向等功能。
一、功能模块
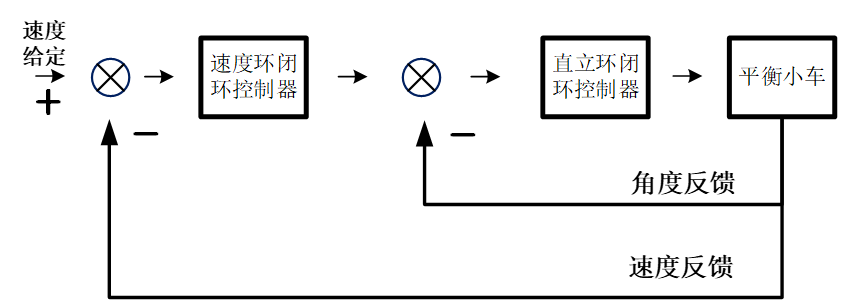
本小车的整体架构图如下图所示:
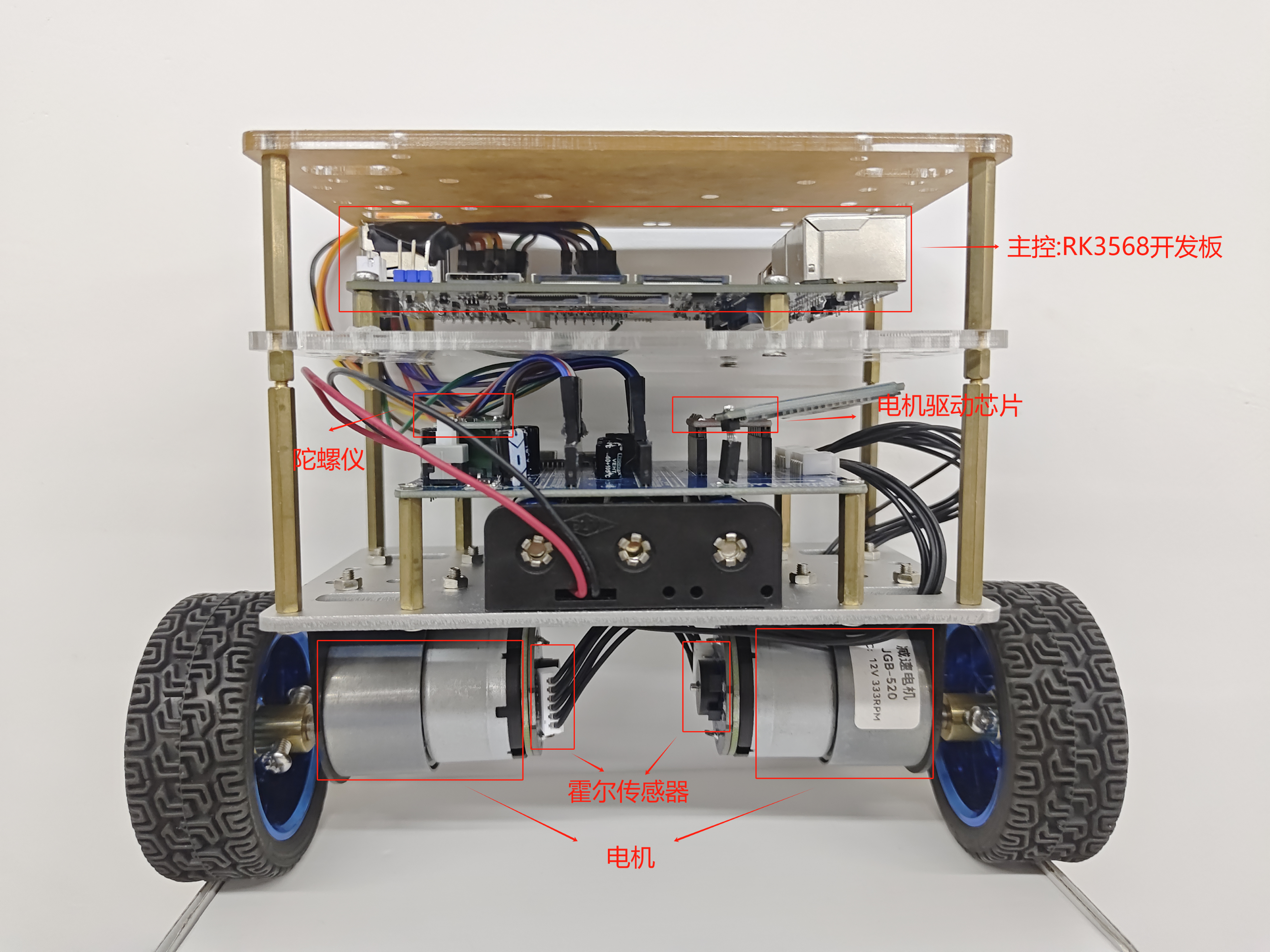
主控的硬件平台是搭载了ARM Cortex A55内核的瑞芯微RK3568开发板,软件平台是Zephyr RTOS。而平衡车则是通过自主采购器件组装而成。主控与平衡车相连,形成了一个高效且简洁的一控一车的整体结构。而平衡车程序主要由电机模块、陀螺仪模块、霍尔传感器模块、PID控制算法模块组成,下面会针对每个模块进行详细介绍:
(1)电机模块
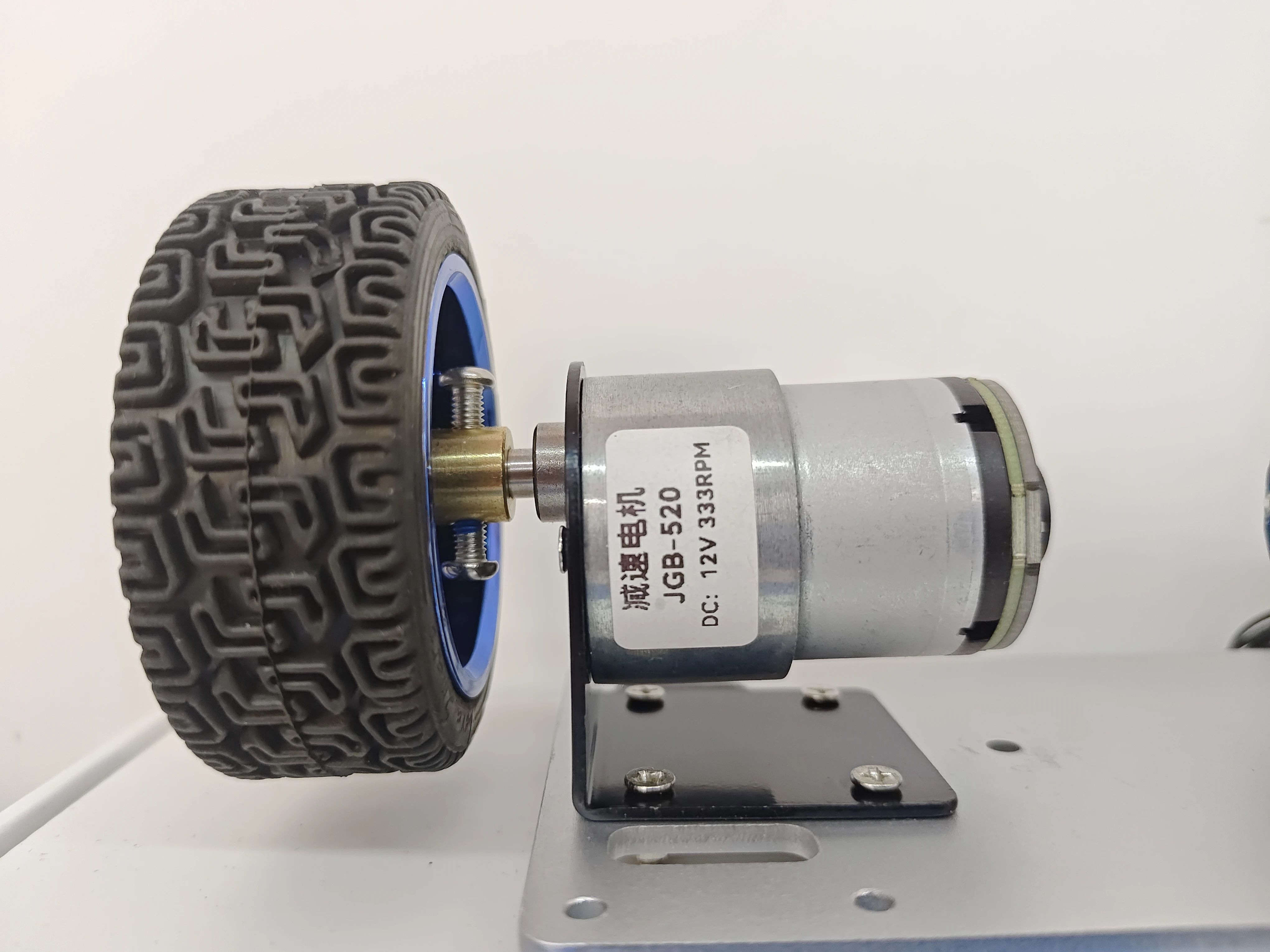
本小车采用的电机和电机控制芯片为JGB-520减速电机和TB6612FNG电机驱动芯片,JGB-520直流减速电机配有减速齿轮箱,能够提供较高的扭矩和较低的转速,适合于需要较大驱动力但不需要非常高速的应用场景。TB6612FNG电机驱动芯片提供对电机的独立控制。通过将RK3568开发板上的GPIO口和PWM口与电机控制芯片相连,就可以实现在开发板中通过操作GPIO口和PWM口来控制电机的正反转和转速。
(2)陀螺仪模块
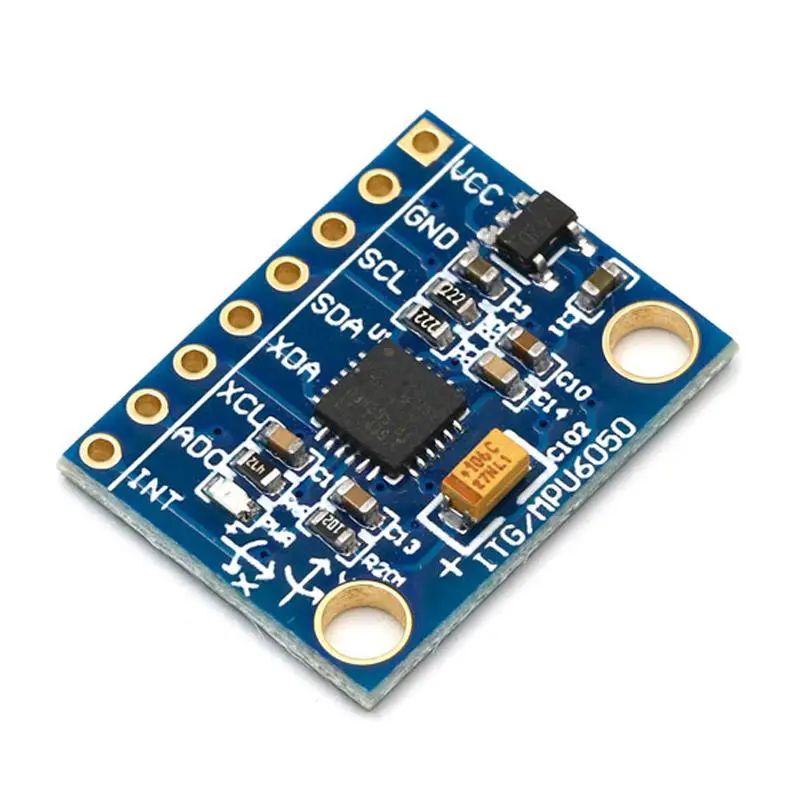
本小车使用的陀螺仪为MPU6050,MPU6050 是一种流行的运动追踪6轴姿态传感器,可以测量芯片自身X、Y、Z轴的加速度、角速度参数。而通过将开发板的I2C口与陀螺仪相连后,就可以通过操作开发板的I2C口来读取MPU6050所得到的角速度和加速度参数。而后还需要对MPU6050所得到的原始数据进行滤波处理,本小车所使用的滤波算法为互补滤波,互补滤波可以将芯片所得到的X、Y、Z轴的加速度、角速度参数来得出小车此时所倾斜的角度。
(3)霍尔编码器测速模块
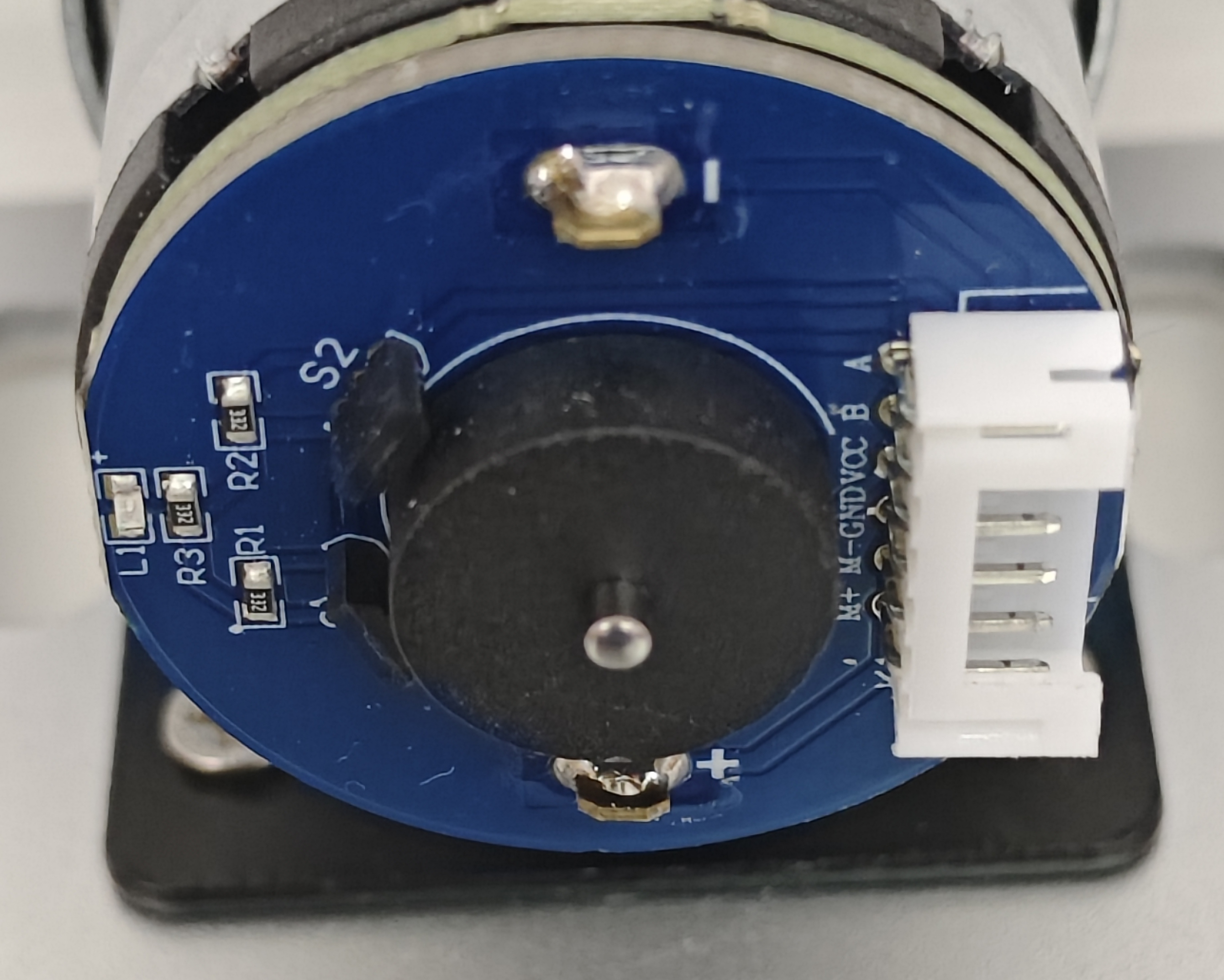
本小车使用的霍尔编码器是一种普遍应用于位置和速度感测的传感器,可以测量电机轴的旋转参数。霍尔编码器通过检测磁场的变化来确定位置,每当编码器附近的磁铁通过霍尔传感器时,它会产生一个电信号。通过将开发板的GPIO口与霍尔编码器相连后,就可以通过轮询读取开发板的GPIO口来读取霍尔编码器所得到的旋转参数,后对旋转参数进行一阶低通滤波处理后就可以得到小车实时的车轮转速。
(4)PID算法控制模块
本小车采用的控制算法为PID(比例-积分-微分)控制算法,PID算法是一种经典的控制算法,广泛应用于工业控制系统中。PID控制器通过三个参数(比例、积分、微分)对控制系统的误差进行修正,而PID算法分为三个部分,直立环、速度环以及转向环。直立环是平衡车控制的核心,根据姿态传感器(MPU6050)提供的倾角数据进行实时调节车体的倾斜角度以让小车能自己保持平衡。速度环根据霍尔编码器得到自身速度,并与目标速度与得到的实际速度之间的误差作为控制依据,最后PID控制器对速度进行调节,以达到辅助直立环控制小车平衡、调节小车速度的功能。转向环用于平衡车的转向控制,通过精确控制左右电机的转速差实现转向控制,当一个电机的速度比另一个快时,车辆会向速度较慢的那一侧转向。例如,如果右侧电机的转速高于左侧电机,车辆将向左转向;反之,则向右转向。
二、实验验证与成果展示
(1)功能测试
实验的第一阶段聚焦于验证Zephyr平台上自平衡车的关键功能。研究人员设计了详尽的测试程序,包括平衡车的平衡车的平衡站立功能、平衡车的遥控运动功能、平衡车的转向功能等。
(2)成果展示
实验的成果在多个层面上得到了展示。首先,Zephyr端成功控制了自平衡车,实现了与裸板和Linux平台上一致的功能。其次,Zephyr平台展现了其在实时操作系统上的优势,特别是在稳定性和实时性方面。最后,实验结果还证实了Zephyr平台能够实现如平衡车这样复杂功能的应用,为未来在工业自动化领域的应用奠定了坚实的基础。
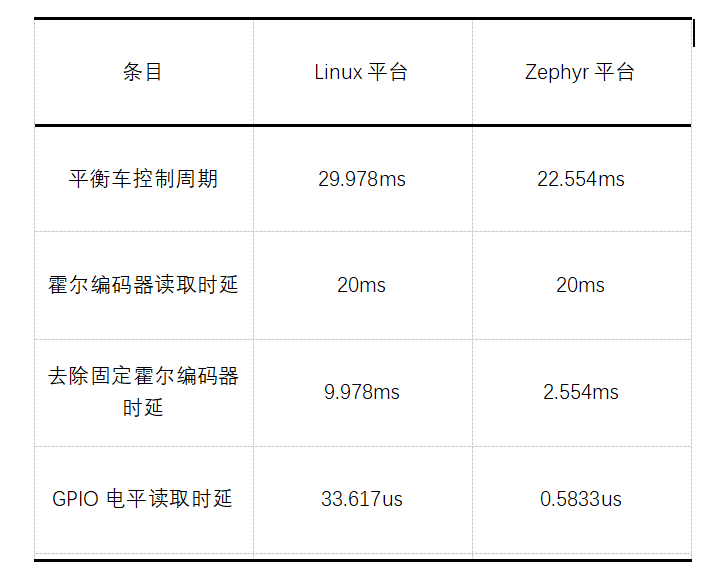
(3)性能评估
进一步的性能评估通过对比Zephyr平台与成熟的Linux操作系统上的平衡车程序的时延。结果显示,Zephyr平台在实时性、稳定性上相较于非实时操作系统平台有着明显的优势。
三、总结
湖南大学嵌入式实验室团队持续拓展Zephyr RTOS在虚拟化、工业总线、端侧AI及机器人控制等关键技术研发及领域应用。通过持续优化和功能扩展,Zephyr系统为嵌入式系统的设计和开发带来新的灵感和可能性,同时也使得实验室在嵌入式计算系统和实时控制领域处于技术前沿。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
